Ontwikkeling Autonome Inspectie Robots (AIRs) voor het drinkwaterdistributienet
De Nederlandse drinkwaterbedrijven moeten de komende decennia een aanzienlijk deel van de 120.000 km waterleidingen vervangen vanwege veroudering en teruglopende sterkte. Om deze opgave op kostenefficiënte wijze op te pakken, is het van belang om de actuele toestand van iedere leiding te kennen.
Om dit voor elkaar te krijgen wordt in dit project een systeem van autonome inspectierobots voor drinkwaterleidingen ontwikkeld. Toepassing van autonome inspectierobots zal de kennisbasis voor assetmanagementbeslissingen vergroten en de kwaliteit van de elementen die de basis vormen voor deze beslissingen verbeteren.
Kennis van het leidingnet
Door de kennisbasis voor assetmanagementbeslissingen te vergroten en de kwaliteit van de elementen die de basis vormen voor deze beslissingen te verbeteren kan iedere leiding op het juiste moment worden vervangen. Daarmee worden kapitaalvernietiging (te vroege vervanging) en overlast (leidingbreuken door te late vervanging) voorkomen. Bestaande technieken voor de inschatting of vaststelling van de toestand, enerzijds modellen en anderzijds technieken voor in situ inspectie, voldoen om uiteenlopende redenen niet voor toepassing op grote schaal.
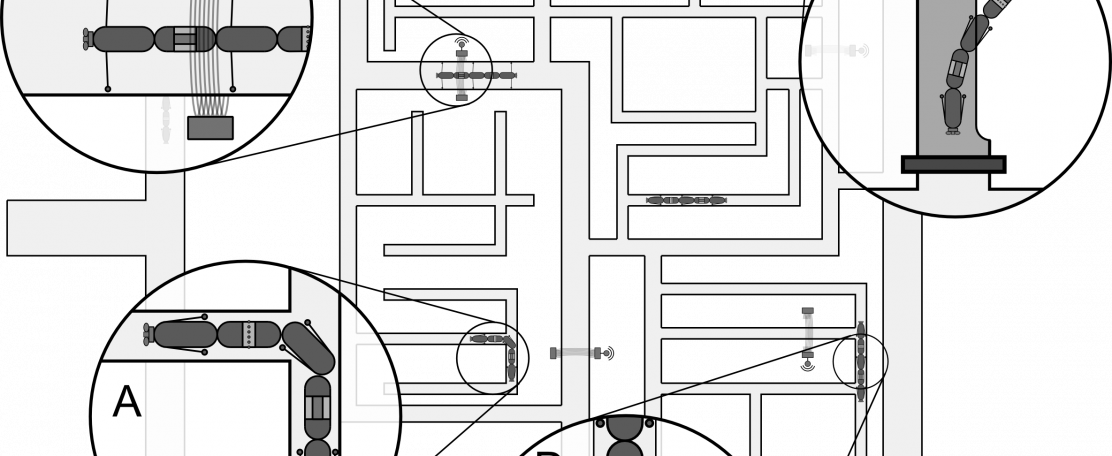
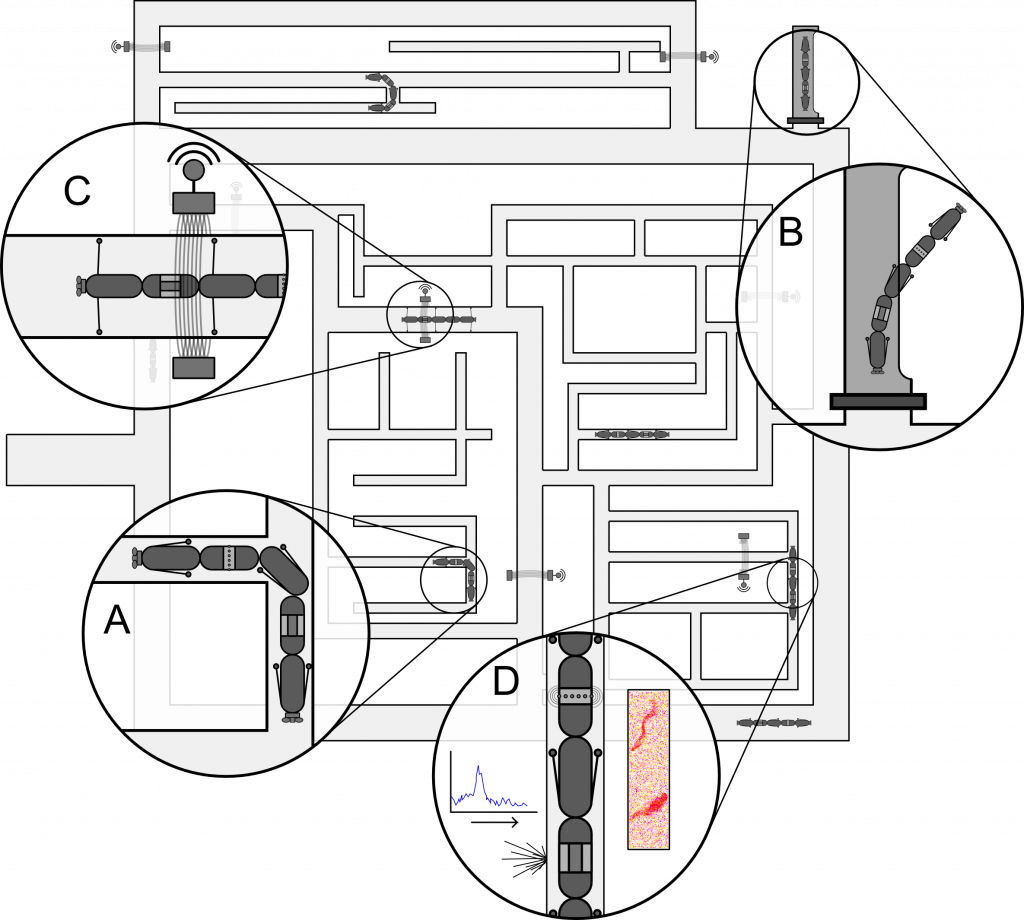
Het voorliggende projectvoorstel omvat de ontwikkeling van een systeem van autonoom opererende robots (AIRs, autonome inspectierobots) die zich permanent in het leidingnet bevinden en die voorzien zijn van diverse sensoren voor onder andere toestandsbepaling van leidingen. De permanente aanwezigheid reduceert operationele onderbrekingen (zoals bij andere inspectietechnieken). De robot wordt ontworpen op toegang tot (bijna) alle leidingen met een diameter in het bereik van 100-300 mm, hetgeen twee derde van het Nederlandse drinkwaternet omvat.
Ontwikkeling van een robotsysteem
In een iteratief ontwerp- en testproces worden ontwikkeld:
- Een autonoom robotsysteem;
- sensoriek voor autonome navigatie;
- sensoriek voor toestandsbepaling van leidingen;
- laadstations voor energie-overdracht en communicatie (afgeven van meetresultaten en ontvangen van opdrachten);
- in- en uitnamepunten;
- een proefinstallatie (lab) voor uitvoerige tests van het systeem voorafgaand aan veldtests;
- een systeem voor recuperatie van incidenteel vastlopende robots.
Het systeem wordt doorontwikkeld tot het niveau van een functioneel model (TRL 6).
Kennisbasis voor assetmanagementbeslissingen
De toepassing van autonome inspectierobots zal niet alleen kapitaalvernietiging en storingen voorkomen, maar ook het lekverlies sterk terugbrengen door het in situ lokaliseren van lekken. Bovendien wordt de algehele systeemkennis, zoals bijvoorbeeld exacte x- en y-locaties en standen van afsluiters, verbeterd. Hiermee kunnen ingrepen in het systeem gerichter en accurater worden uitgevoerd (ook door derden, zodat graafschade afneemt) en worden ook modelberekeningen waarop operationele, tactische of strategische beslissingen worden gebaseerd betrouwbaarder.
Het AIR-project wordt uitgevoerd door een samenwerkingsverband van 7 Nederlandse drinkwaterbedrijven, KWR Watercycle Research Institute en 4 technologieleveranciers; Demcon, DoBots, Geodan en Acquaint.
De drinkwaterbedrijven zijn de opdrachtgevers en belangrijkste participanten in het project omdat zij als eindgebruikers enerzijds de gebruikerseisen opstellen & monitoren tijdens het ontwikkeltraject en anderzijds een faciliterende & evaluerende rol hebben bij de veldtests. Zij zijn in de positie om tijdens de ontwikkeling mee te praten, zodanig dat het eindresultaat zo goed mogelijk op hun behoeften aansluit. De benodigde technologische ontwikkeling wordt mede gerealiseerd door de 4 technologieleveranciers. Zij leveren noodzakelijke, gedegen kennis en ervaring op het gebied van onder andere mechatronica, elektronica, autonomie, navigatie, datamanagement, sensoring en leidinginspecties.
De eerste fase van productontwikkeling, waarin oplossingen zijn bedacht en getest voor alle kritieke functies die aanvankelijk waren geïdentificeerd als technologische risico’s voor het ontwikkelingsproject, is voltooid. De tweede fase, waarin de haalbaarheid van de bedachte oplossingen wordt onderzocht, is in volle gang.
- Brabant Water Dunea Evides Vitens PWN WMD WML Demcon Acquaint
Peter van Thienen
KWR
030 6069 602
Nellie Slaats
KWR
030 6069 524